


2021-08-03
Варианты ПМГ второго рода
Это самая интересная часть работы, где мы рассмотрим различные варианты ПМГ, используя достаточно простые формулы (1.2-1.5) из предыдущего раздела.
Для этого мы будем менять форму сигнала для генераторов G1 и G2, фазы и соотношение частот между ними, варьировать некоторые номиналы элементов схемы 1b,
подставлять всё это в формулы, и смотреть, что у нас получится.
1. Прямоугольные импульсы и одинаковая частота в G1 и G2
Рассмотрим вариант ПМГ, предложенный ранее, где сигнал генератора G1 был прямоугольным, изменяющимся от +1 до -1, при этом индуктивность L менялась генератором G2 от 1 до 0.2 (рис. 2b). Для удобства просмотра, график 4 был дополнен значениями напряжения U, изменением индуктивности L, и теперь представлен на рисунке 6. Сопротивление R мы сделали равным единице.
Рассмотрим вариант ПМГ, предложенный ранее, где сигнал генератора G1 был прямоугольным, изменяющимся от +1 до -1, при этом индуктивность L менялась генератором G2 от 1 до 0.2 (рис. 2b). Для удобства просмотра, график 4 был дополнен значениями напряжения U, изменением индуктивности L, и теперь представлен на рисунке 6. Сопротивление R мы сделали равным единице.
Методика расчёта следующая.
Значения тока для графика мы получаем из формулы (1.2), а уже исходя из этих значений рассчитываем мощности по формулам (1.3-1.4), а уже отсюда — прирост КПД по формуле (1.5).
В данном случае прирост получается такой: \(K_{\eta 2} = 15.6 \).
Если же фазу изменения индуктивности сдвинуть на 180 градусов, как на рисунке 2c, то прирост КПД немного изменится: \(K_{\eta 2} = 17.8 \).
Изменяя индуктивность не в пять раз, а в два, прирост КПД уменьшится примерно на 80%: \(K_{\eta 2} = 9.7 \).
Если увеличить сопротивление R до десяти, то прирост КПД сильно уменьшится, вплоть до единицы:
\(K_{\eta 2} = 1.04 \).
Вы можете самостоятельно проверить эти данные и ввести свои, воспользовавшись следующей подпрограммой для MathCAD.
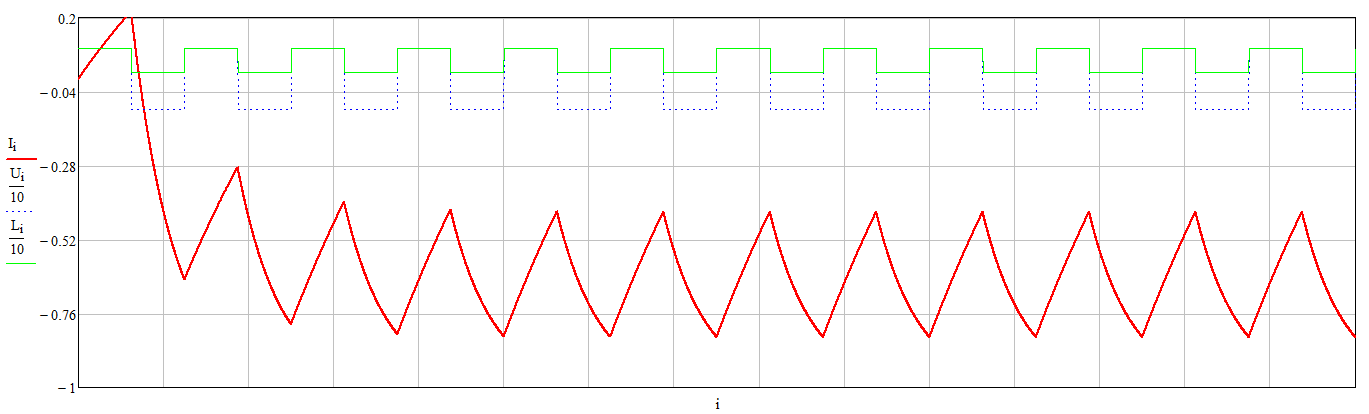
Рис.6. Ток в цепи - красный график, напряжение U(t) - синий, изменение индуктивности L(t) - зелёный
|
Преимущество такого варианта ПМГ очевидно: одинаковая частота и даже фаза прямоугольных колебаний для G1 и G2, чего можно добиться, вообще говоря, одним генератором.
Недостаток — большое взаимное влияние этих генераторов друг на друга, которое приводит нас к параметрической цепи первого рода и к подъединичному приросту КПД.
Впрочем, это взаимное влияние можно частично компенсировать применяя специальные сердечники, например, обладающие магнитной анизотропией.
2. Частота G1 и G2 отличается в два раза, форма колебаний у G1 — синусоидальная
Рассмотренный выше пример работает при одинаковых частотах в G1 и G2, что не всегда даёт хорошие результаты в плане взаимного невлияния друг на друга этих генераторов. Более интересный, но более сложный ПМГ получается, если частоту генератора G2 удвоить относительно G1. Причём форма сигнала у G1 — синусоидальная (рис. 7).
Рассмотренный выше пример работает при одинаковых частотах в G1 и G2, что не всегда даёт хорошие результаты в плане взаимного невлияния друг на друга этих генераторов. Более интересный, но более сложный ПМГ получается, если частоту генератора G2 удвоить относительно G1. Причём форма сигнала у G1 — синусоидальная (рис. 7).
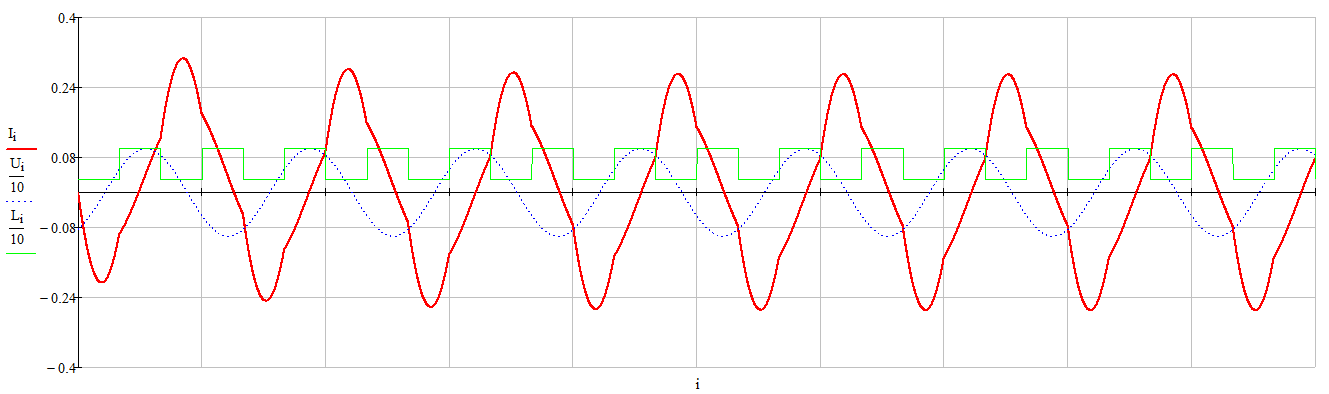
Рис.7. Ток в цепи - красный график, напряжение U(t) - синий, изменение индуктивности L(t) - зелёный
|
Остальные параметры схемы такие: индуктивность L меняется от 0.3 до 1, а частота G2 немного сдвинута по фазе относительно G1, сопротивление R равно 0.5.
При этом, прирост КПД в такой схеме может достигать значений 4 и выше.
Недостаток у такого подхода также имеется и заключается в довольно точной регулировки сдвига фаз между G1 и G2, а также — тщательным подбором сопротивления нагрузки.
Тем не менее, есть сведения, что именно такой подход позволил некоторым изобретателям создать высокоэффективные устройства ПМГ.
Здесь также есть сдвиг в отрицательную (положительную) часть графика тока, но это не так очевидно, по сравнению с предыдущим примером.
Смещение получается за счёт несимметрии самих колебаний относительно нуля.
Проверить это, и сделать свои подстановки, можно в следующей подпрограмме для MathCAD.
3. Одинаковая частота в G1 и G2, форма колебаний у G1 — синусоидальная, сигнал G2 - импульсный
Пожалуй, самый интересный вариант ПМГ — импульсный, когда индуктивность в параметрической цепи меняется скачком и импульсно, при этом длина импульса многократно меньше периода колебаний. Здесь существует масса подвариантов, когда можно изменять фазу между G1 и G2, при этом одновременно меняя сопротивление нагрузки и коэффициент изменения индуктивности. Поэкспериментировать с такими изменениями можно в этой подпрограмме для MathCAD.
Пожалуй, самый интересный вариант ПМГ — импульсный, когда индуктивность в параметрической цепи меняется скачком и импульсно, при этом длина импульса многократно меньше периода колебаний. Здесь существует масса подвариантов, когда можно изменять фазу между G1 и G2, при этом одновременно меняя сопротивление нагрузки и коэффициент изменения индуктивности. Поэкспериментировать с такими изменениями можно в этой подпрограмме для MathCAD.
На следующем графике представлен такой вариант (рис. 8).
Сопротивление R здесь равно 0.3 и при уменьшениии этого значеня (до определённого предела) даёт дополнительный прирост КПД.
Длина импульса, который изменяет индуктивность L, равна здесь 2% от периода колебаний, а коэффициент изменения равен 5.
При этом, форма тока в цепи остаётся почти синусоидальной, однако сползает в положительную область, что при данных параметрах схемы даёт прирост КПД в 4 раза.
Необходимо заметить, что это далеко не предел.
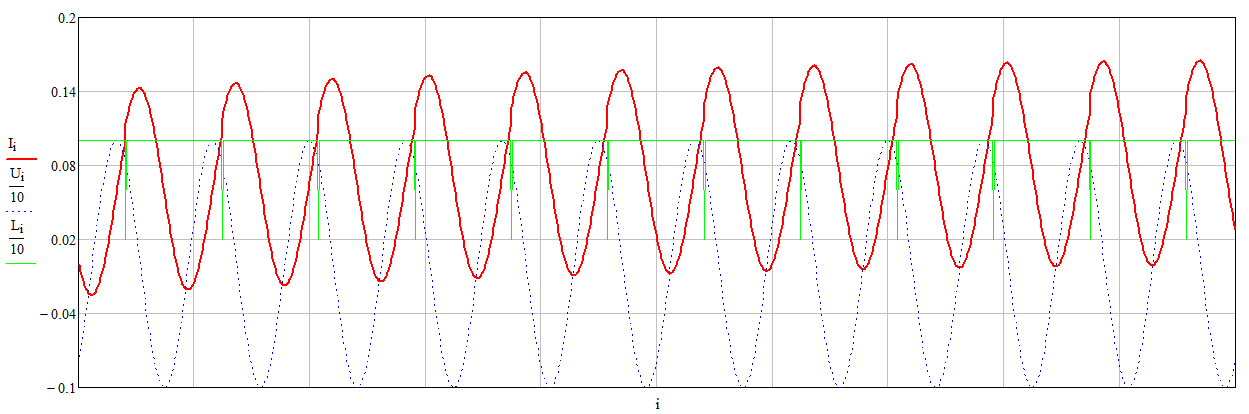
Рис.8. Ток в цепи - красный график, напряжение U(t) - синий, изменение индуктивности L(t) - зелёный
|
Недостаток такого варианта ПМГ заключается в точной регулировке фазы между G1 и G2 и довольно чувствительной нагрузке.
Зато преимущества для исследователей — просто огромны.
Самое важное, — что частоты в G1 и G2 совпадают, а значит задающий генератор может быть общим.
Остаётся создать правильное изменение индуктивности и сдвиг фазы между колебаниями в G1 и импульсом в G2.
Остановимся подробнее на импульсном изменении индуктивности L.
Самый простой и известный уже минимум 100 лет способ — искровой, когда ферромагнитный материал сердечника катушки возбуждается импульсным током в цепи разрядника.
К слову, этим же способом можно возбуждать и окружающую среду в том случае, когда сердечник отсутствует.
Также интересен метод встряхивания когерера слабым электрическим полем [1], что приводит к довольно значительным изменениям в его структуре и проницаемости.
Чуть менее известный способ — механический. При этом проницаемость сердечника L меняется изменением положения рядом находящегося ферромагнитного материала, либо магнита (генераторы Адамса, Бедини).
Есть и более экзотические способы изменения индуктивности, например такой,
когда феррит в электрическом поле, при определённых частотах, изменяет свою проницаемость.
Есть и совсем необычный способ параметрического изменения индуктивности, за счёт изменений свойств сердечника в момент импульса.
Он требует определённой подготовки и терпения, ибо найти такую точку, одновременно подбирая напряжение, фронт импульса, его длину и материал, довольно сложная задача,
обычно заканчивающаяся скатыванием в параметрику первого рода с соответствующим классическим КПД.
Ещё один недостаток такого варианта — частичное или полное разрушение материала сердечника со временем.
Зато такой способ вообще не требует второго генератора, а импульсы на катушку подаются с первого (G1).
С неё же, либо со вторичной обмотки, производится съём в нагрузку.
Откуда дровишки?
О применении таких генераторов в качестве источников свободной энергии можно говорить только, если нам удаётся найти относительно малозатратный способ изменения L при помощи G2.
При этом мощность в нагрузке \(P_R\) из формулы (1.5) должна превышать сумму мощностей, затрачиваемых на функционирование двух генераторов: \(P_U + P_{pm}\).
В этом случае возникает вполне закономерный вопрос: откуда берётся дополнительная энергия?
Ответов на этот вопрос много.
Некоторые исследователи утверждают, что такая энергия берётся из эфира, но эфир, по его определению, и есть энергия.
Более современный подход к этой проблеме предполагает, что энергия подкачивается из окружающей среды, например, из Земли, представляющей огромный резервуар отрицательных зарядов.
И действительно, некоторые установки ПМГ требуют заземления, а мы уже знаем,
как параметрические схемы могут вытягивать дополнительные электроны.
Но автор всё же склоняется к более полному использованию внутренней энергии электрона в таких системах,
когда тот получает ускорение, либо усиливает свою энергию за счёт приобретения более высокого потенциала, в момент изменения индуктивности катушки.
В пользу этого предположения выступает факт смещения графика тока в положительную или отрицательную область, при котором катушка сама становится источником питания.
Немного о настройке и материалах
Из графиков 6-8 сразу видна одна закономерность, заключающаяся в обязательном сдвиге тока в параметрической цепи относительно напряжения U от генератора G1.
Этот сдвиг должен быть около 90 градусов и не сильно меняться при изменении индуктивности L.
Таким образом, первый этап настройки ПМГ заключается именно в достижении такого сдвига.
Уже после этого можно приступать ко второй части — подключению и настройке G2.
В наиболее общем случае, при совместной работе этих генераторов, нужно добиться сдвига осциллограммы тока в одну из областей: положительную или отрицательную.
Это и будет означать достижение требуемого эффекта.
Нужно сказать пару слов и о материале сердечника для катушки L.
Известно, что даже на оптимальных рабочих частотах, ферриты имеют достаточно большие потери при перемагничивании.
Кроме того, они обладают совершенно разными характеристиками кривой Столетова для разных плоскостей намагничивания.
Зачастую, начальная магнитная проницаемость в разных плоскостях отличается у них на порядки.
Более оптимально применение сердечников из современных аморфных материалов, например, метгласа [2-3].
Выводы
В этой работе была показана принципиальная возможность построения устройств свободной энергии на основе ПМГ второго рода с двумя генераторами.
Эти исследования были сделаны при помощи класических методов расчёта электрических цепей и сопоставлены с работающими устройствами.
При расчётах не учитывались энергетические затраты на параметрическое изменение индуктивности,
но, как показывает практика, они могут быть как относительно большими, так и относительно малыми в сравнении с общей энергетикой устройства.
Всё зависит от способа такого изменения, материала сердечника и других параметров схемы, которые выберет исследователь.
При условии относительно небольших затратах на параметрическое изменение индуктивности, можно добиться довольно высоких показателей прибавки КПД второго рода,
которая покроет энергетические затраты на это изменение, и даже, частично, на подводимую к схеме мощность.
В пределе возможен режим самовозбуждения, который должен быть ограничен специальными дополнительными элементами для защиты схемы.
Как видится автору, оптимальным вариантом ПМГ может стать такой, в котором соблюдаются одинаковые частоты для генераторов G1-G2,
а изменение индуктивности L будет производиться импульсно (вариант №3).
Также, исследователям стоит обратить своё внимание на современные метаматериалы, из которых будет изготавливаться сердечник катушки.
Лучше всего, если они будут обладать анизотропными магнитными свойствами для уменьшения взаимовлияния генераторов G1-G2.
Данная методика предполагает, что устройство работает на относительно гладком участке кривой Столетова,
которая характеризует все ферромагнитные материалы.
В реальной катушке это также может быть реализовано только частично.
Представленная здесь методика расчёта может быть применима к цепям, содержащим параметрическую ёмкость, а также, к другим видам электрических цепей с параметрическими элементами.
Пл материалам этой работы был разработан специализированный калькулятор.