


2021-09-20
Параметрический резонанс второго рода в RL-цепи
Исследование графическим методом
Исследование графическим методом
В первой части этой работы мы разработали математическую модель параметрического резонанса (ПР) применительно к RL-цепям второго рода.
Во второй части мы исследуем полученные формулы (1.10-1.14) графическими методами, которые наглядно должны представить этот необычный феномен.
Также, нам станет совершенно очевидно, почему в реальных экспериментах пройти мимо него очень просто.
Для исследования этого необычного ПР графическим методом, перепишем формулы из предыдущей части в относительном (или удельном) виде, а в качестве пределов интегрирования, выберем только один период:
\[\bar P_R(\alpha, Q) = \int \limits_0^1 {\sin(\omega t - \varphi)^2 \over 1 + Q(\alpha, t)^2}\, \partial t \qquad (2.1)\]
\[\bar P_1(\alpha, Q) = \int \limits_0^1 {\sin(\omega t) \sin(\omega t - \varphi) \over \sqrt{1 + Q(\alpha, t)^2}}\, \partial t \qquad (2.2)\]
Относительную форму этих интегралов будет намного удобнее использовать при дальнейших расчётах, а в абсолютную — они преобразовываются так:
\[P_R(\alpha, Q) = p_r\, \bar P_R(\alpha, Q), \quad p_r= {U_m^2 R \over R_r^2} \qquad (2.3)\]
\[P_1(\alpha, Q) = p_1\, \bar P_1(\alpha, Q), \quad p_1= {U_m^2 \over R_r} \qquad (2.4)\]
Здесь \(p_r\) и \(p_1\) — это абсолютные мощности без учёта влияния индуктивности, т.е. они представляют собой значения мощностей, которые были бы в схеме, если выводы катушки L замкнуть.
Также напомним, что:
\[\varphi = \arctan{Q}, \quad Q = {\omega L \over R_r} \qquad (2.5)\]
\[Q(\alpha, t) = {\omega L(t) \over R_r} = Q\, [1 + m |\sin(\omega t n /2 + \alpha /2)|] \qquad (2.6)\]
Обозначим прирост КПД таким образом:
\[K(\alpha, Q) = {P_R(\alpha, Q) \over P_1(\alpha, Q) + P_2} \qquad (2.7)\]
Причём пока допустим, что \(P_2=0\), т.е. на изменение параметра индуктивности энергия не расходуется.
Позже мы посмотрим, как меняется картина, когда эта мощность не равна нулю.
А пока построим график по этим формулам, причём установим следующие начальные параметры: \(n=2, m=0.2\).
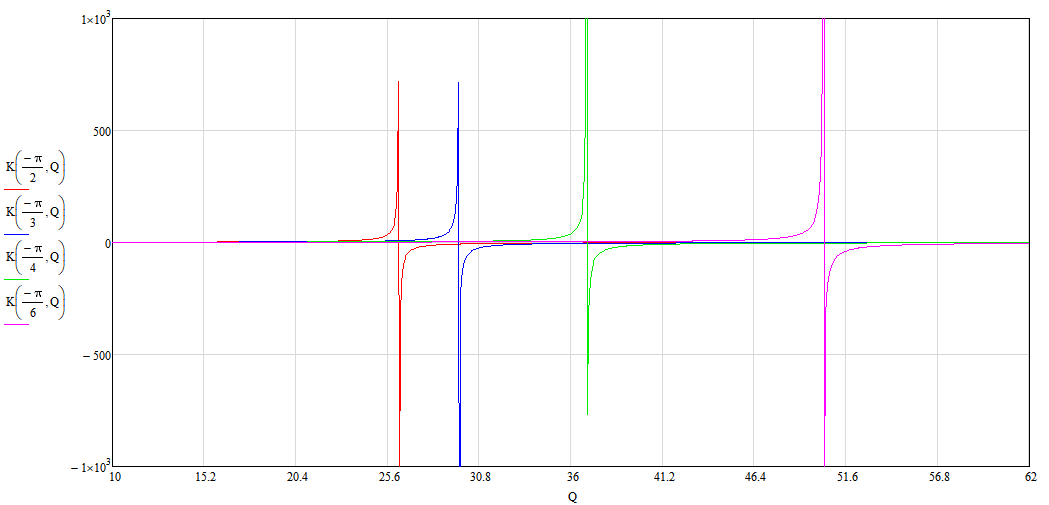
Рис.2. Зависимость прироста КПД от угла α и добротности Q при: n=2, m=0.2, P2=0
|
Это и есть ПР второго рода для RL-цепи в чистом виде: с учётом его отрицательных значений и без учёта мощности потребления вторым генератором (\(P_2=0\)).
Под отрицательными значениями подразумевается, что в результате параметрического процесса в источник возвращается больше энергии, чем этот источник затрачивает.
В данном случае это активная мощность первого генератора (\(P_1\)).
Причём, после максимума она остаётся хоть и небольшой, но всё же отрицательной до самых больших значений Q.
Такое представление графика не очень удобное, и будет лучшим вариантом взять модуль от прироста КПД
\[K(\alpha, Q) = \left| {P_R(\alpha, Q) \over P_1(\alpha, Q) + P_2} \right| \qquad (2.8)\]
а эту ось сделать логарифмической.
Теперь этот же график, более наглядно, будет выглядеть так:
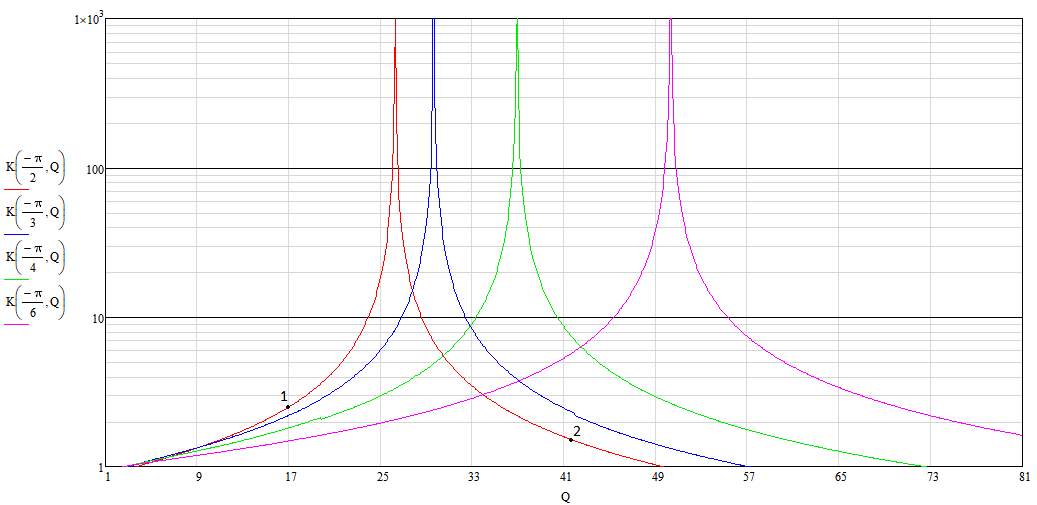
Рис.3. Зависимость прироста |КПД| от угла α и добротности Q при: n=2, m=0.2, P2=0
|
А теперь давайте рассмотрим этот график (рис.3) более детально и сравним его значения с калькулятором.
Сразу бросается в глаза довольно сложная зависимость максимумов КПД от угла \(\alpha\).
При этом, оптимальным является угол \(\alpha = - \pi/2\), который на этом графике представлен красной кривой.
Чем меньше будет добротность Q, тем больше — ток через нагрузку, а значит и активная мощность всего устройства.
Кроме того, сделать катушку с меньшей добротность легче, чем с высокой.
Поэтому лучше выбирать такие углы, при которых Q будет меньше.
Забегая немного вперёд, дополнительно, из практики можно сказать, что после максимума, резко начинает возрастать мощность потребления второго генератора,
и оптимальная рабочая точка устройства выбирается на возрастающей части графика.
К слову, если при n=2 сделать углы \(\alpha\) положительными, то вся система будет подъединичной при любом Q, поэтому эти варианты мы не рассматриваем.
Сравним несколько значений этого графика со специализированным калькулятором.
Например, примем следующие значения: \(Q=17, n=2, m=0.2, \alpha= -\pi/2\) (или "-90" градусов), проверим эту точку в
калькуляторе
и на красном графике (точка 1).
Обращаем ваше внимание на то, что калькулятору требуется несколько секунд для подсчёта: дождитесь выполнения задачи.
Калькулято показывает \(K_{\eta 2}=2.17\), что примерно соответствует показаним графика.
Чем больше будет подсчитано периодов в калькуляторе, тем точнее будет результат, но тем дольше он будет считать.
На данный момент в нём установлены ограничение числа периодов, поэтому к правильному результату можно только приблизится с какой-то конечной точностью.
При больших m и Q, для приемлемой точности, необходимо большое число периодов, 100 и более, что пока не позволяет сделать калькулятор.
Возьмём ещё одну точку и примем следующие значения: \(Q=42, n=2, m=0.2, \alpha= -\pi/2\), проверим её в
калькуляторе
и на красном графике (точка 2).
Как мы уже знаем, после максимума, мощность P1 имеет отрицательные значения, а значит что КПД устремляется к бесконечности, что и показывает калькулятор.
Давайте посмотрим графики при большем значении коэффициента модуляции: m=0.5 (рис. 4).
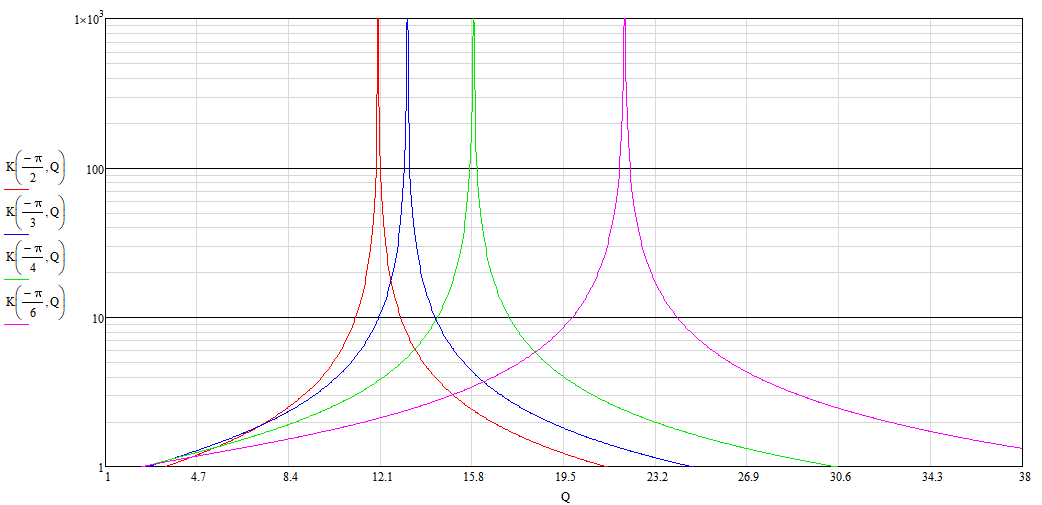
Рис.4. Зависимость прироста |КПД| от угла α и добротности Q при: n=2, m=0.5, P2=0
|
Как мы видим, все максимумы сместились к левому краю графика, а это означает, что при большем значении коэффициента модуляции m можно применять меньшую добротность катушки Q.
Ещё большие значения m использовать нежелательно, т.к. упадёт точность наших расчётов, поскольку форма тока начнёт сильно
отличаться от синусоидальной.
А теперь оценим относительную мощность в активной нагрузке PR и мощность генератора G1 (P1), и посмотрим на их зависимость от сдвига фазы и добротности (рис.5-6).
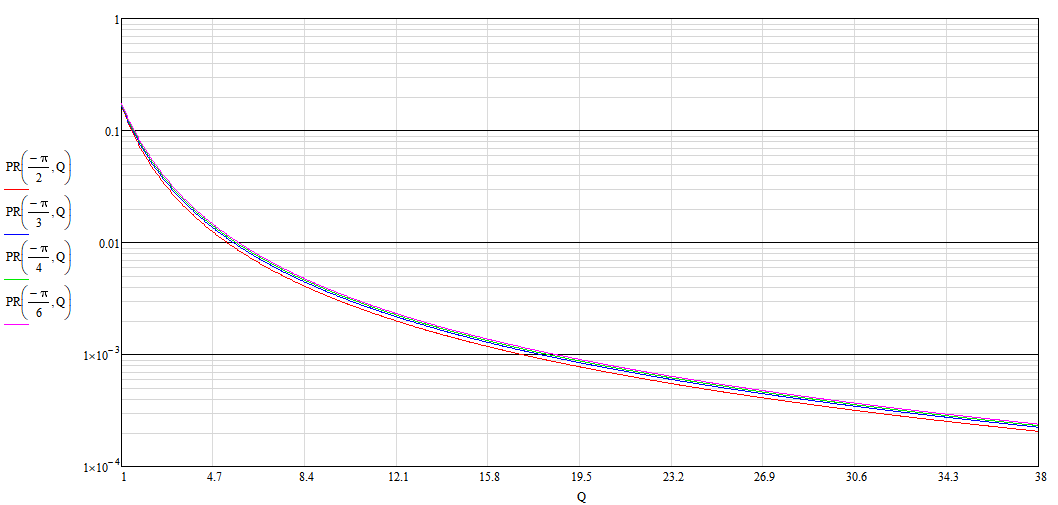
Рис.5. Зависимость PR от угла α и добротности Q при: n=2, m=0.5, P2=0
|
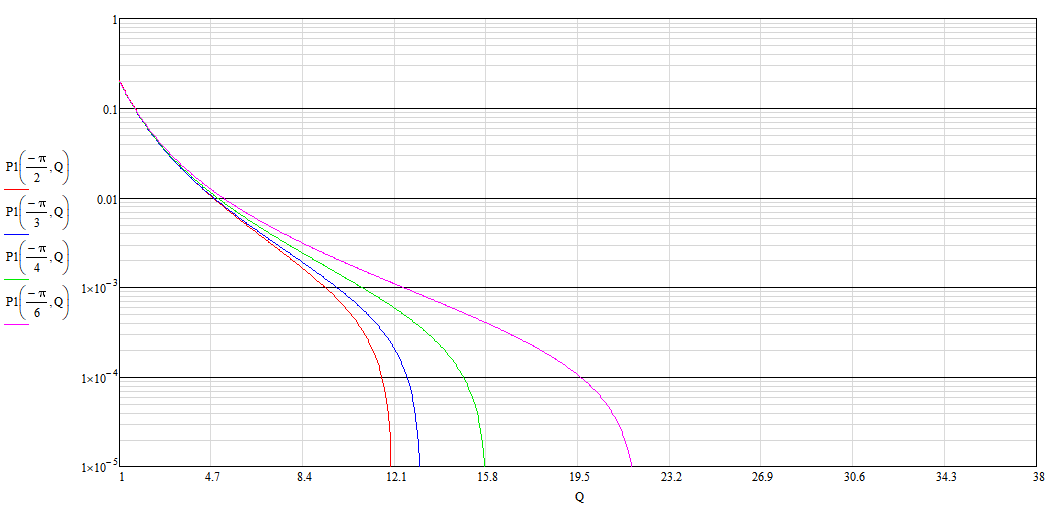
Рис.6. Зависимость P1 от угла α и добротности Q при: n=2, m=0.5, P2=0
|
Легко догадаться, что мощность PR не зависит от сдвига фазы, но сильно зависит от добротности,
а мощность P1 зависит и от фазы и от добротности, причём там, где на графике КПД (рис. 4) максимум, там на графике мощности (рис. 6) наблюдается переход на отрицательные значения.
Обратите также внимание, что рабочий участок начинается с мощностей, на порядок-два меньших от номинальных значений.
Таким образом, в реальном устройстве не нужно гнаться за максимальной выходной мощностью, но следует подобрать её оптимальное значение, при котором потребляемая мощность станет минимальной, а прирост КПД станем максимальным.
Осталось посмотреть те же зависимости, но при другом отношении частот: n=1.
Здесь эффект наблюдается только при положительном сдвиге фаз (рис. 7-8).
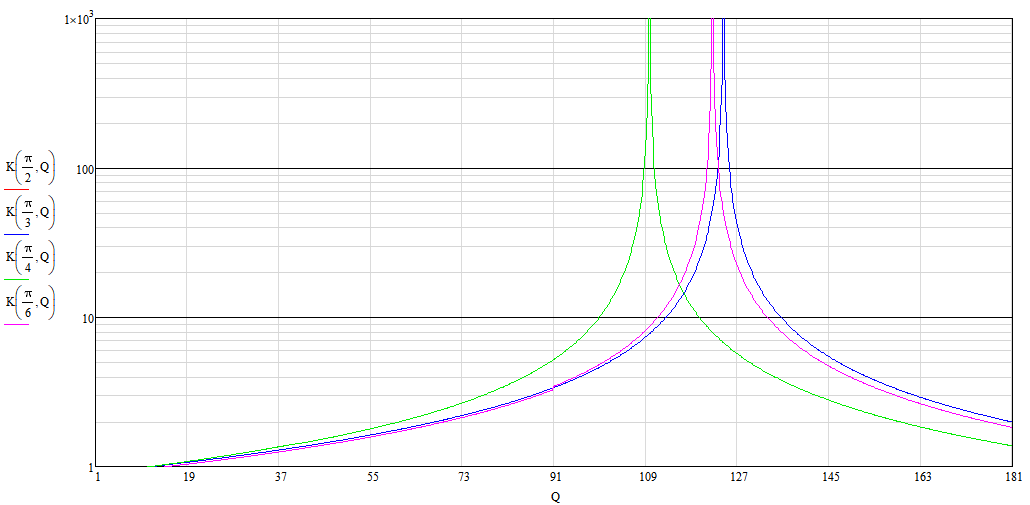
Рис.7. Зависимость прироста |КПД| от угла α и добротности Q при: n=1, m=0.2, P2=0
|
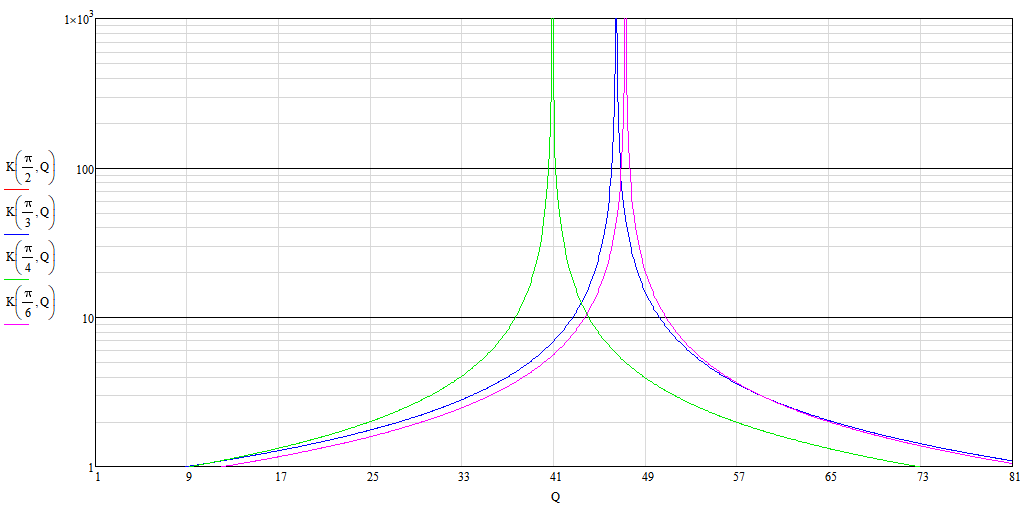
Рис.8. Зависимость прироста |КПД| от угла α и добротности Q при: n=1, m=0.5, P2=0
|
При таком коэффициенте отношения частот, наблюдается сильная зависимость от фазового сдвига и рабочим оказывается только небольшой его диапазон.
Также, для выхода на рабочий участок здесь нужна относительно большая добротность катушки, в несколько раз большая, чем при n=2 (сравните рисунок 4 и 8).
Исходя из всего этого, такое соотношение частот не рекомендуется для использования.
А что, если взять n больше двух?
Как оказалось, при таком соотношении частот не наблюдается сверхъединичных значений \(K_{\eta 2}\) на любом участке графика.
Этот пункт является ещё одним отличием от классического ПР, где резонанс возможен при \(n>2\).
В этом можно убедиться, если попробовать получить \(K_{\eta 2}>1\) в
калькуляторе.
Во всяком случае, эта закономерность работает, пока форма тока не сильно отличается от синусоидальной.
Если же в качестве модулирующего сигнала взять прямоугольные импульсы, то так получить сверхъединичные зачения становится возможным, т.к. здесь будут работать высшие гармоники этих импульсов.
Этот вариант мы рассмотрим в одной из следующих работ.
А сейчас посмотрим, каким будет изменение КПД при ненулевой мощности потребления второго генератора,
и рассмотрим два примера: \(P_2 = 2 \cdot 10^{-4}\) и \(P_2 = 5 \cdot 10^{-4}\).
Напомним, что все мощности здесь — относительные.

Рис.9. Зависимость прироста КПД от угла α и добротности Q при: n=2, m=0.2, P2=2*10-4
|

Рис.10. Зависимость прироста КПД от угла α и добротности Q при: n=2, m=0.2, P2=5*10-4
|
Из рисунков 9 и 10 хорошо видно, что прирост КПД очень зависит от мощности потребления второго генератора:
при этой мощности в 2*10-4 максимальный прирост достигает 4.5, но при мощности в 5*10-4 максимальный прирост будет уже менее 1.3.
Понятно, что в последнем случае поймать необходимый эффект в реальном устройстве невозможно, т.к. мы не учитываем КПД всех элементов схемы, который нивелируют прибавку.
Зато, если P2 будет относительно небольшой, то при попадании в нужный диапазон добротности, мы вполне можем его обнаружить.
Интересно, что если эта мощность окажется менее 2*10-4, то при определённой Q, вся схема может уйти вразнос, а её элементы могут выйти из строя.
Также, следует обратить внимание на угол сдвига между напряжением G1 и током в цепи: наилучшее его значение, при n=2, остаётся равным "-90" градусов,
как это и было отмечено ранее.
Выводы
В этой работе мы познакомились с параметрическим резонансом второго рода, который возникает параметрической RL-цепи.
От классического ПР он отличается тем, что при резонансе изменения амплитуды почти не происходит,
зато заметно уменьшается активная мощность потребления задающего генератора, что приводит к резкому увеличению КПД схемы.
Второе отличие — резонанс второго рода возможен при соотношении частот модулирующего и задающего генератора 1:1 и 2:1.
Во всяком случае, это относится к синусоидальному модулирующему сигналу.
Оптимальным углом сдвига между колебаниями модулирующего и задающего генератора являются:
- при соотношении частот 1:1 оптимальный сдвиг составляет 45 градуса;
- при соотношении частот 2:1 оптимальный сдвиг составляет "-90" градусов.
Соотношение частот 1:1 не рекомендуется для применения в реальных схемах,
т.к. при этом, для достижения эффекта, требуется в несколько раз большая добротность или в несколько раз меньшая мощность потребления модулирующим генератором,
что может оказаться невыполнимым требованием.
Необходимый эффект, при котором достигается приемлемый прирост КПД, получается в определённом диапазоне добростности цепи и угле сдвига "-90" градусов, что видно из графика 9.
В реальных схемах получение этого эффекта возможно при предварительном расчёте диапазон добротности и последующей регулировкой частоты задающего генератора, которая меняет и добротность согласно формуле (2.3).
При этом сдвиг фаз между колебаниями модулирующего и задающего генератора должен быть стабильным и составлять "-90" градусов,
а соотношение частот меджу этими генераторами должно быть 2:1.
При настройке устройства не нужно гнаться за максимальной выходной мощностью, но следует подобрать её оптимальное значение, при котором потребляемая мощность станет минимальной, а прирост КПД станем максимальным.
В следующем разделе мы усовершенствуем графический метод и найдём аналитические значения оптимальных углов.