


2022-11-19
Свёртка глобального вектора скорости на основе кватернионов
Цилиндрическая система координат
Сразу же нужно оговориться, что здесь мы будем рассматривать четырёхмерную цилиндрическую систему координат,
отличающуюся от классической трёхмерной [1] наличием ещё одной координаты, которая обычно представляет собой время в неподвижной системе отсчёта.
Она хорошо работает в упрощённом виде, когда точка вращается с угловой частотой \(\omega\) вокруг какого-либо центра по радиусу \(r\),
и одновременно движется по координате \(z\) со скоростью \(v_z\), перпендикулярной плоскости вращения.
Тогда мы сразу же можем принять следующие очевидные соотношения между перечисленными параметрами и \(a, b, d\) в (1.1) из предыдущей части:
\[\begin{cases}
a = \arcsin(\beta_r \sin(\omega t)) \\
b = \arcsin(\beta_r \cos(\omega t))\\
d = \arcsin(\beta_z)
\end{cases} \tag{2.1}\]
При этом, радиус связан с угловой частотой так:
\[\beta_r = {\omega r \over c} \tag{2.2}\]
а относительная скорость по координате \(z\) находится так:
\[\beta_z = {v_z \over c} \tag{2.3}\]
Учитывая, что
\[\cos(\arcsin(x)) = \sqrt{1 - x^2} \tag{2.4}\]
найдём линейную форму цилиндрического кватерниона
\[ V = c \cdot e^{\mathbf{i}a} e^{\mathbf{j}b} e^{\mathbf{k}d} = c\, (A + \mathbf{i} B + \mathbf{j} C + \mathbf{k} D) \tag{2.5}\]
в котором:
\[\begin{cases}
A = \gamma_s \gamma_c \gamma_z - \beta_r^2 \beta_z \sin(\omega t) \cos(\omega t) \\
B = \beta_r \sin(\omega t) \gamma_c \gamma_z + \beta_r \beta_z \cos(\omega t) \gamma_s \\
C = \beta_r \cos(\omega t) \gamma_s \gamma_z - \beta_r \beta_z \sin(\omega t) \gamma_c \\
D = \beta_z \gamma_s \gamma_c + \beta_r^2 \sin(\omega t) \cos(\omega t) \gamma_z \\
\tag{2.6} \end{cases}\]
\[\gamma_s = \sqrt{1 - \beta_r^2 \sin(\omega t)^2},\, \gamma_c = \sqrt{1 - \beta_r^2 \cos(\omega t)^2},\, \gamma_z = \sqrt{1 - \beta_z^2} \tag{2.7}\]
Линейная форма замечательна тем, что её, в свою очередь, можно преобразовать в аналогичную векторную форму
\[ V \to \mathbf{V}_{||} \tag{2.8}\]
представляющая собой такой же свёрнутый линейный вектор:
\[ \mathbf{V}_{||} = c\, \big( \mathbf{i_0} A + \mathbf{i_1} B + \mathbf{i_2} C + \mathbf{i_3} D \big) \tag{2.9}\]
где: \(\mathbf{i_n}\) — единичные векторы нашего 4-х мерного реального пространства, которым можно поставить в соответствие более привычные координаты:
\[
\mathbf{i_0} \to t \\
\mathbf{i_1} \to X \\
\mathbf{i_2} \to Y \\
\mathbf{i_3} \to Z
\tag{2.10}\]
А теперь необходимо проверить, что в полученном линейном кватернионе, и аналогичном ему векторе, выполняется главное свойство GVV:
\[ |V| = |\mathbf{V}_{||}| = c \tag{2.11}\]
Теперь мы можем выбирать любую форму представления свёрнутого GVV, которая нам будет удобнее: (2.5) или (2.9).
Вектор длины
Интегрируя (2.5) или (2.9) мы получим свёрнутый вектор длины:
\[ L = \int \limits_0^t V\, \partial t \tag{2.12}\]
или
\[ \mathbf{L}_{||} = \int \limits_0^t \mathbf{V}_{||}\, \partial t \tag{2.13}\]
По аналогии с (2.9), можно представить линейный вектор длины так:
\[ \mathbf{L}_{||} = c\, \left( \mathbf{i_0} \int \limits_0^t A\, \partial t + \mathbf{i_1} \int \limits_0^t B\, \partial t + \mathbf{i_2} \int \limits_0^t C\, \partial t + \mathbf{i_3} \int \limits_0^t D\, \partial t \right) \tag{2.14}\]
Этот вектор мы будем использовать дальнейших выводах.
Частные случаи
Будет интересно рассмотреть некоторые частные случаи формулы (2.6).
Первый такой случай возникает в большинстве ситуаций в нашем мире, когда продольная и круговая скорости много меньше скорости света:
\[\begin{cases}
A = 1 \\
B = \beta_r \sin(\omega t) \\
C = \beta_r \cos(\omega t) \\
D = \beta_z \\
\tag{2.15} \end{cases}, \quad \beta_r, \beta_z \ll 1\]
Тогда выходит, что по координатам X и Y движется точка с круговой сокростью \(v_r\) по окружности,
и одновременно линейно — по координате Z, со скоростью \(v_z\), т.е. получаем классическое представление о нашем пространстве:
\[ \mathbf{V}_{||} = \mathbf{i_0} c + \mathbf{i_1} v_r \sin(\omega t) + \mathbf{i_2} v_r \cos(\omega t) + \mathbf{i_3} v_z \tag{2.16}\]
Далее мы будем представлять наглядные графики полученных формул, в которых, условно, \(c=1\).
А также, поскольку нельзя показать все четыре координаты, мы будем отражать только три из них: X, Y и Z.
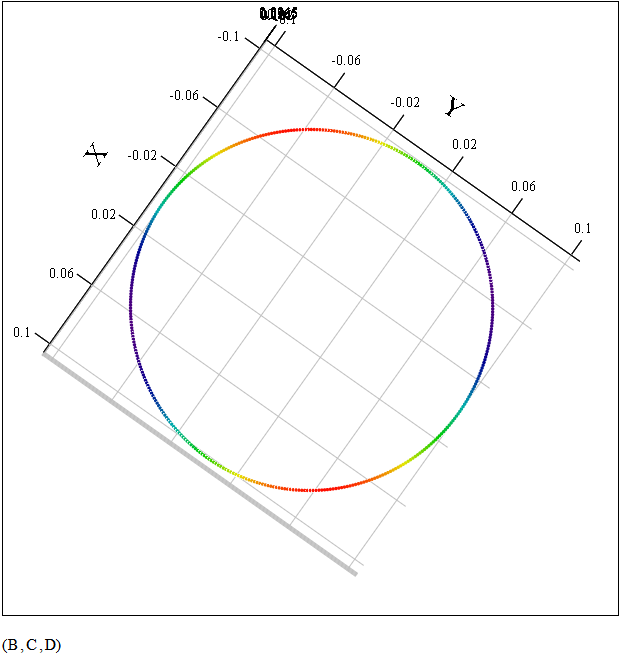
Рис.1. График скорости по (2.6) при: \(\beta_r = 0.1,\, \beta_z = 0.1\)
|
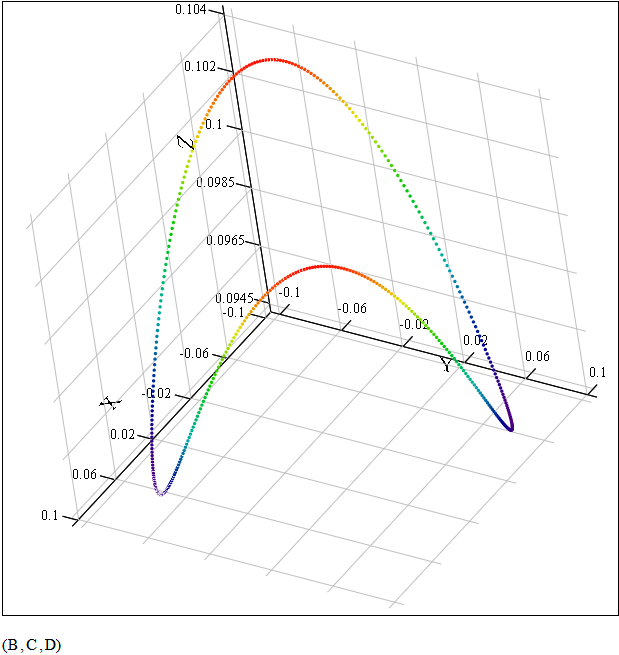
Рис.2. Другой ракурс графика (рис.1)
|
Интегрируя скорость мы получаем длину:
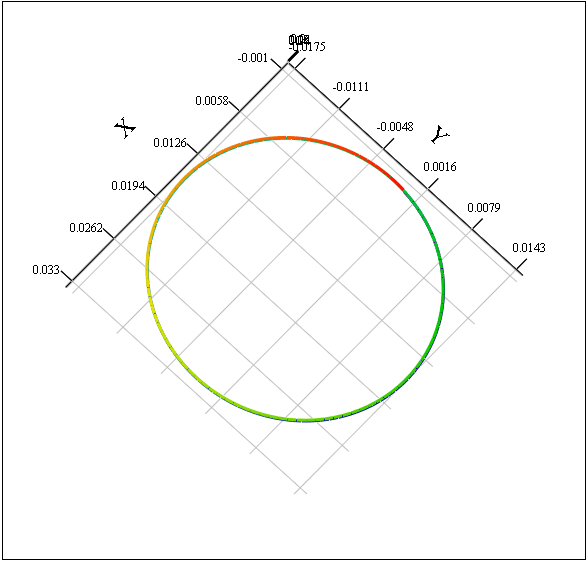
Рис.3. График длины по (2.14) при: \(\beta_r = 0.1,\, \beta_z = 0.1\)
|
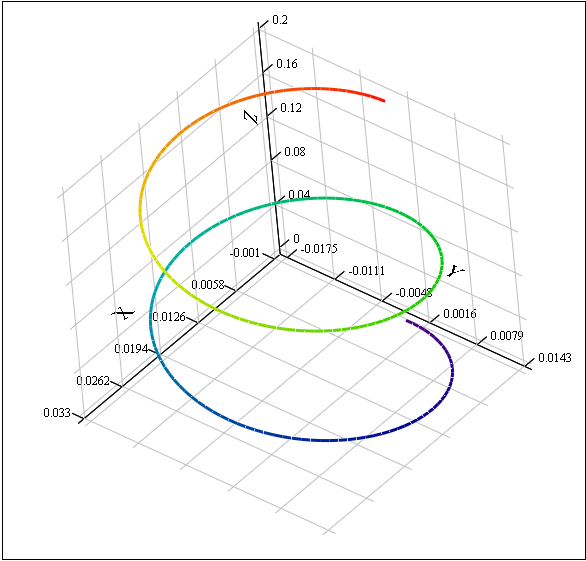
Рис.4. Другой ракурс графика (рис.3). Два оброта
|
По мере увеличения скоростей, ситуация с нашим пространством начинает меняться.
Когда скорость по координате Z достигает световой, то время в подвижной системе почти останавливается (\(A=0\)),
а скорость по координатам X и Y становится фактически пропорциональна ускорению:
\[\begin{cases}
A = 0 \\
B = \beta_r \cos(\omega t) \\
C = - \beta_r \sin(\omega t) \\
D = 1 \\
\tag{2.17} \end{cases}, \quad \beta_r \ll 1,\, \beta_z=1 \]
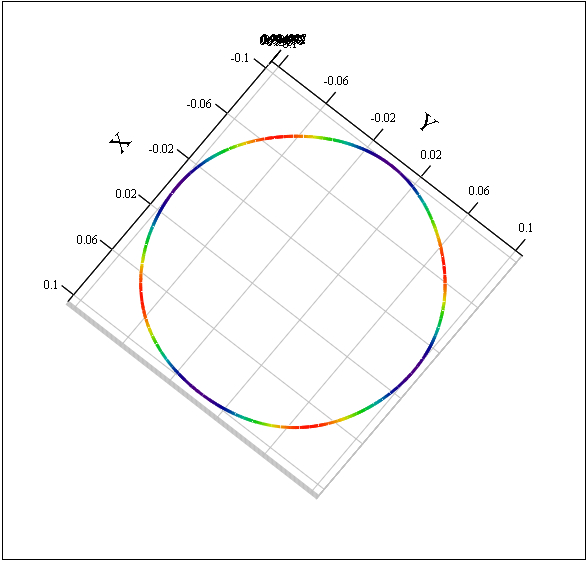
Рис.5. График скорости по (2.6) при: \(\beta_r = 0.1,\, \beta_z = 1\)
|
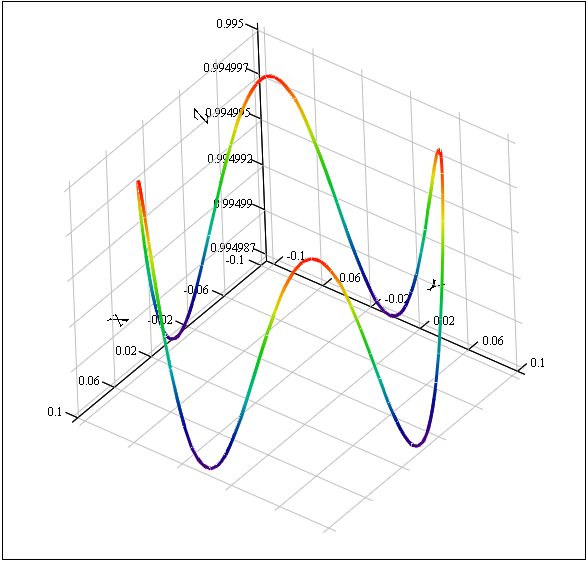
Рис.6. Другой ракурс графика (рис.5)
|
Интегрируя скорость мы получаем длину:
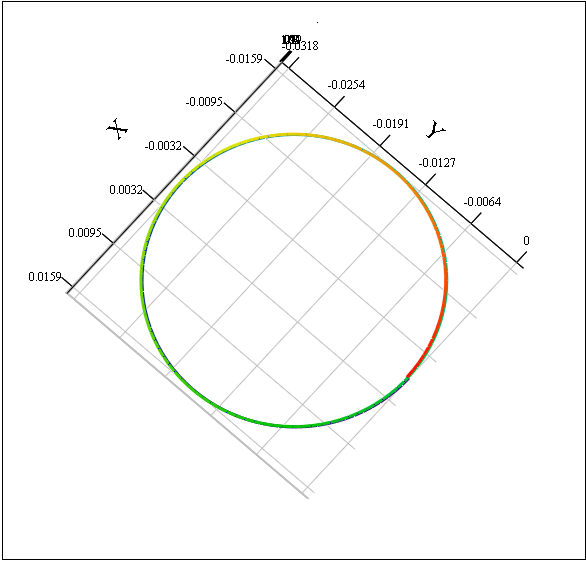
Рис.7. График длины по (2.14) при: \(\beta_r = 0.1,\, \beta_z = 1\)
|
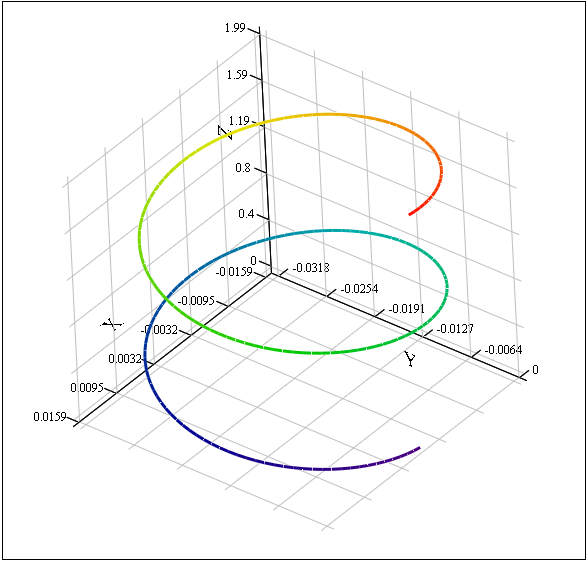
Рис.8. Другой ракурс графика (рис.7). Два оброта
|
Ещё один частный случай можно представить, если приравнять линейную и круговую скорости к \(c\).
В отличие от предыдущего случая здесь координата времени имеет периодический характер, впрочем, как и все остальные:
\[\begin{cases}
A = - \sin(\omega t) \cos(\omega t) \\
B = \cos(\omega t)\, |\cos(\omega t)| \\
C = - \sin(\omega t)\, |\sin(\omega t)| \\
D = |\sin(\omega t) \cos(\omega t)| \\
\tag{2.18} \end{cases}, \quad \beta_r=1,\, \beta_z=1\]

Рис.9. График скорости по (2.6) при: \(\beta_r = 1,\, \beta_z = 1\)
|
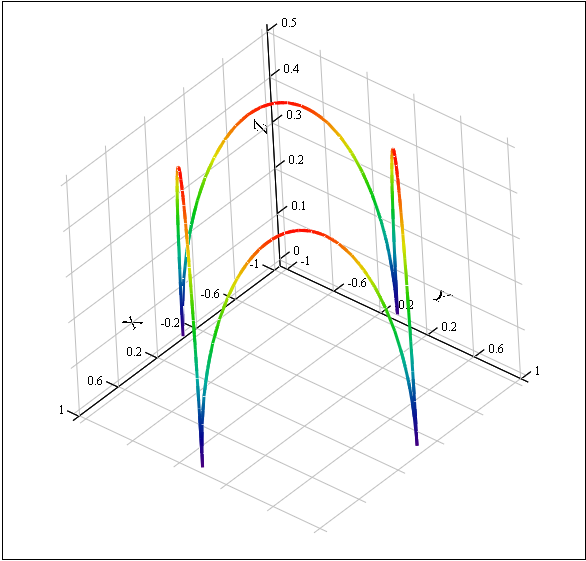
Рис.10. Другой ракурс графика (рис.9)
|
Интегрируя скорость мы получаем длину:
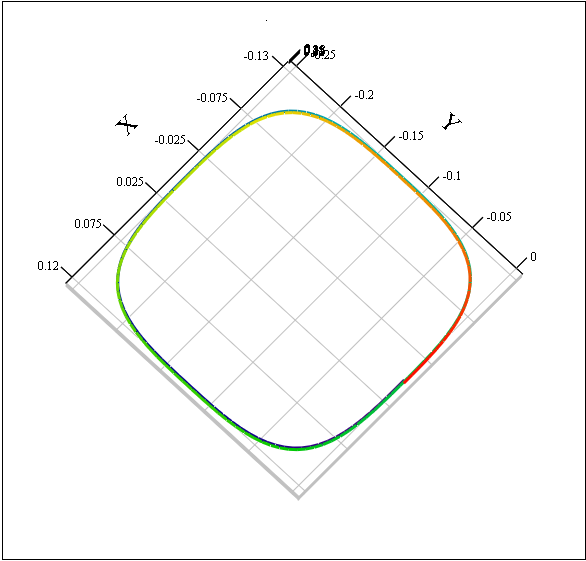
Рис.11. График длины по (2.14) при: \(\beta_r = 1,\, \beta_z = 1\)
|
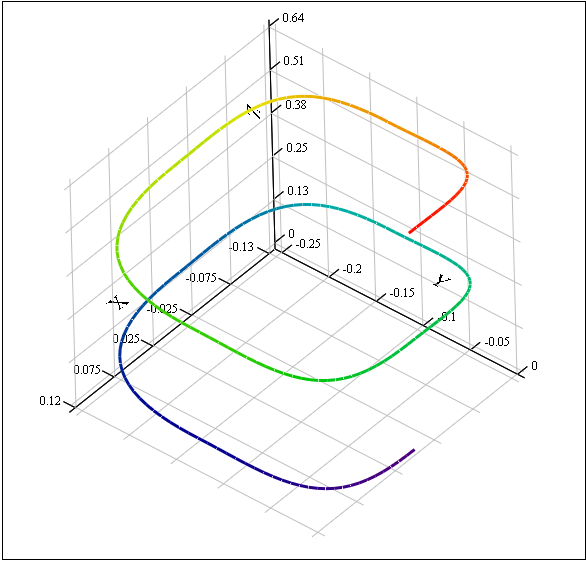
Рис.12. Другой ракурс графика (рис.11). Два оброта
|
Также, ещё один частный случай можно получить, если принять круговую скорость, равной \(c\), а линейную скорость приравнять к нулю.
Можно наблюдать интересное явление, когда, несмотря на отсутствие начального движения по координате Z, ненулевая скорость здесь всё же имеется:
\[\begin{cases}
A = |\sin(\omega t) \cos(\omega t)| \\
B = \sin(\omega t)\, |\sin(\omega t)| \\
C = \cos(\omega t)\, |\cos(\omega t)| \\
D = \sin(\omega t) \cos(\omega t) \\
\tag{2.19} \end{cases}, \quad \beta_r=1,\, \beta_z=0\]
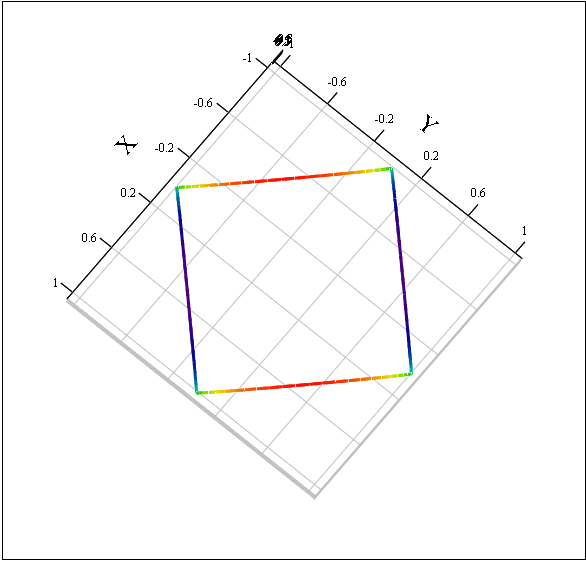
Рис.13. График скорости по (2.6) при: \(\beta_r = 1,\, \beta_z = 0\)
|
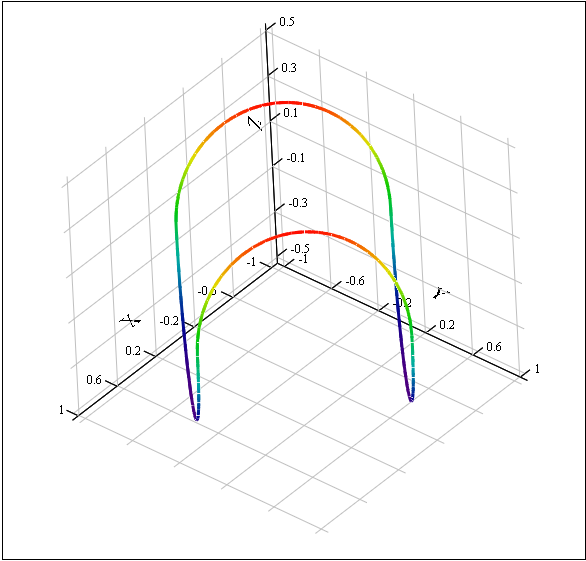
Рис.14. Другой ракурс графика (рис.13)
|
Интегрируя скорость мы получаем длину:
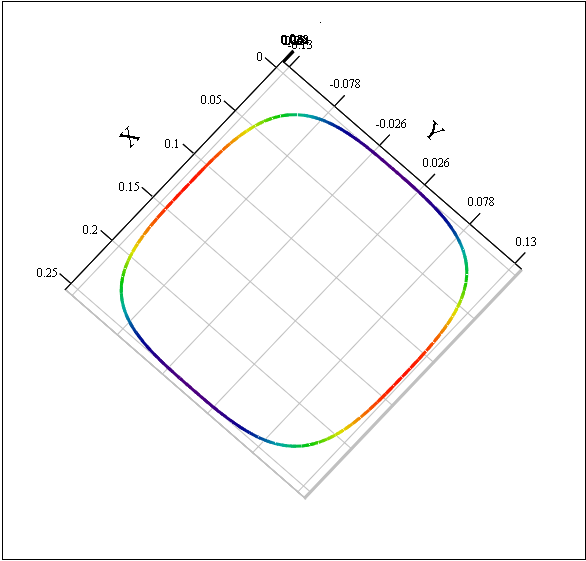
Рис.15. График длины по (2.14) при: \(\beta_r = 1,\, \beta_z = 0\)
|

Рис.16. Другой ракурс графика (рис.15)
|
Необычный результат мы получим, если в последнем случае сделаем скорость по Z ненулевой, но значительно меньшей скорости света.
При этом, график скорости останется почти таким же, а вот график длины приобретёт следующий вид:
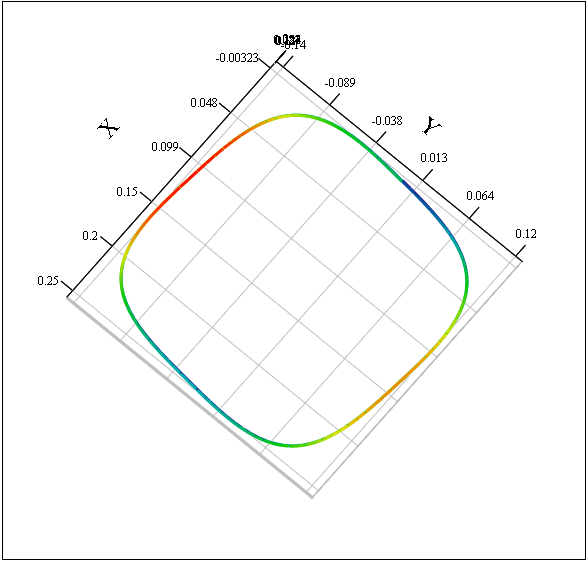
Рис.17. График длины по (2.14) при: \(\beta_r = 1,\, \beta_z = 0.1\)
|
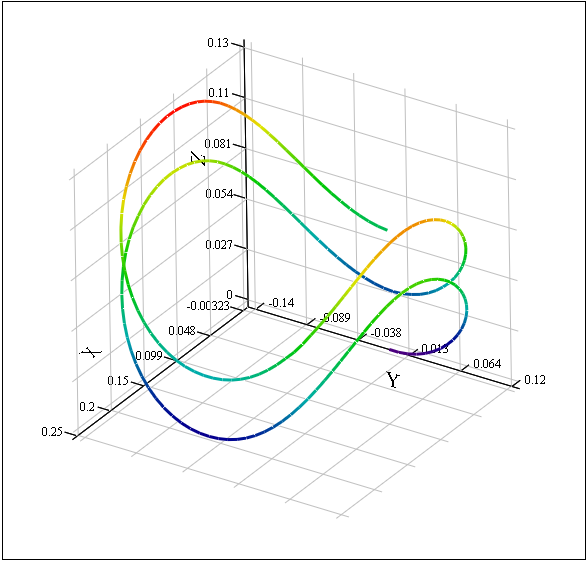
Рис.18. Другой ракурс графика (рис.17). Два оброта
|
В следующих частях этой работы мы исследуем сферическую и декартову систему координат, также применяя кватернионы для проекции глобального вектора на наше 4-х мерное пространство.
Используемые материалы
- Википедия. Цилиндрическая система координат.