


2022-11-25
Свёртка глобального вектора скорости на основе кватернионов
Для того, чтобы перейти от глобального вектора скорости (GVV) к четырёхмерным координатам нашего пространства
необходимо сдеть проекцию (свёртку) GVV на наше пространство.
В этом нам хорошо помогают кватернионы.
С другой стороны, для любой точки всегда можно найти систему, в которой она будет двигаться прямолинейно и равномерно (первый закон Ньютона).
Это означает, что для точки можно подобрать соответствующую систему координат, в которой это движение будет пространственно одномерно.
А уже отсюда следует:
Движение отдельно взятой точки в пространстве всегда одномерно.
Этот факт хорошо иллюстрирует следующий пример.
Следовательно, нам нужно найти соответствующую систему координат, где наша точка будет совершать одномерно-пространственное движение.
Если точка движется по окружности, то самая подходящая система координат — цилиндрическая, которая была нами представлена в предыдущей части этой работы.
В ней относительная скорость \(\beta_r\), представляющая в этой системе радиус, и есть единственная пространственная координата.
Но в отображении нашей пространственно трёхмерной системы координат, движение такой точки займёт две координаты.
Остаётся одна пространственная координата, значение которой берётся из GVV:
\[\mathbf{V} = \frac{c}{\gamma} \sum \limits_{n=0}^{\infty} \mathbf{j_n} \beta_r^n = \frac{c}{\gamma} \big( \mathbf{j_0} + \mathbf{j_{1.1}}\, \beta_r \sin(\omega t) + \mathbf{j_{1.2}}\, \beta_r \cos(\omega t) + \mathbf{j_2}\, \beta_r^2 + \mathbf{j_3}\, \beta_r^3 + \ldots \big) \tag{3.1}\]
Здесь первые три слагаемые представляют собой систему координат с известными данными о вращении точки:
\[ \mathbf{V}_{0,1,2} = \frac{c}{\gamma} \big( \mathbf{j_0} + \mathbf{j_{1.1}}\, \beta_r \sin(\omega t) + \mathbf{j_{1.2}}\, \beta_r \cos(\omega t) \big) \tag{3.2}\]
а остальные слагаемые — это вероятностные векторы, которые могут входить в формулу по-одному, суммой нескольких векторов (частичной свёрткой), или все вместе,
и представлять собой третью пространственную координату.
Это предположение следует из того факта, что мы не знаем, какое именно слагаемое из (3.1), при \(n \ge 2\), представляет третью координату.
А потому вполне логично ввести вероятность появления того или иного слагаемого (или их частичную свёртку) в качестве третьей координаты:
\[ \mathbf{V}_{3} = \pm\, \mathbf{j_2} \frac{c}{\gamma} \sqrt{\tilde\beta_r^4 + \tilde\beta_r^6 + \tilde\beta_r^8 + ...} = \pm\, \mathbf{j_2} \frac{c}{\gamma} \sqrt{\sum \limits_{n=2}^{\infty} \tilde\beta_r^{2n}} \tag{3.3}\]
Знак тильды над относительной скоростью \(\tilde\beta_r\) означает, что вероятность появления этого слагаемого равна 1/2.
Т.е. при подсчёте формулы (3.3), на каждом шаге итерации, нужно вычислять вероятность появления в ней каждого из слагаемых:
\[\tilde\beta_r^{n} = \beta_r^{n} \cdot int(rand\, 2) \tag{3.4}\]
\(int(rand\, 2)\) — случайное целое число: 0 или 1.
Также, необходимо получать знак плюс или минус перед формулой (3.3) с той же вероятностью — 1/2.
Также, необходимо получать знак плюс или минус перед формулой (3.3) с той же вероятностью — 1/2.
Вероятностная цилиндрическая система координат
Формула (3.3) отражает точку в системе GVV.
Для того, чтобы отразить её движение в неподвижной системе координат и в нашем четырёхмерном пространстве, необходимо создать на него проекцию (или свёртку).
В этом нам, как и ранее, будет помогать кватернион, при помощи которого это делается довольно просто.
Также, здесь мы применим приведенную в прошлой части этой работы, цилиндрическую систему координат.
Собственно, вся основная работа уже проделана и основные формулы для отображения результатов известны: (2.6-2.7, 3.3).
Остаётся вместо неизвестной относительной скорости \(\beta_z\), подставить вероятностную скорость из (3.3):
\[ \beta_z = \pm\, \sqrt{\sum \limits_{n=2}^{\infty} \tilde\beta_r^{2n}} \tag{3.5}\]
получив таким образом вероятностную цилиндрическую систему координат.
Тогда свёрнутый до нашего пространства GVV будет находиться так:
\[ \mathbf{V}_{||} = c\, \big( \mathbf{i_0} A + \mathbf{i_1} B + \mathbf{i_2} C + \mathbf{i_3} D \big) \]
\[\begin{cases}
A = \gamma_s \gamma_c \gamma_z - \beta_r^2 \beta_z \sin(\omega t) \cos(\omega t) \\
B = \beta_r \sin(\omega t) \gamma_c \gamma_z + \beta_r \beta_z \cos(\omega t) \gamma_s \\
C = \beta_r \cos(\omega t) \gamma_s \gamma_z - \beta_r \beta_z \sin(\omega t) \gamma_c \\
D = \beta_z \gamma_s \gamma_c + \beta_r^2 \sin(\omega t) \cos(\omega t) \gamma_z \\
\end{cases}\]
\[\gamma_s = \sqrt{1 - \beta_r^2 \sin(\omega t)^2},\, \gamma_c = \sqrt{1 - \beta_r^2 \cos(\omega t)^2},\, \gamma_z = \sqrt{1 - \beta_z^2} \tag{3.6}\]
Где: \(\mathbf{i_0} \ldots \mathbf{i_3}\) — еденичные векторы нашего 4-х мерного пространства, а \(\beta_z\) находится из (3.5).
Теперь мы смело можем получать наглядные графики при помощи любого математического редактора.
Теперь мы смело можем получать наглядные графики при помощи любого математического редактора.
Посмотрим на графики вероятных направлений относительной скорости \(\beta_r = 0.1\) в различных плоскостях (для 30000 точек)
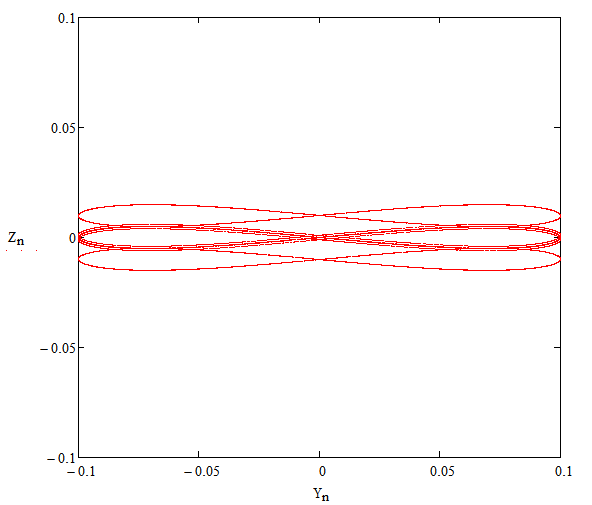
Рис.19. График вероятной скорости по (3.6) при: \(\beta_r = 0.1\). Плоскость YZ
|
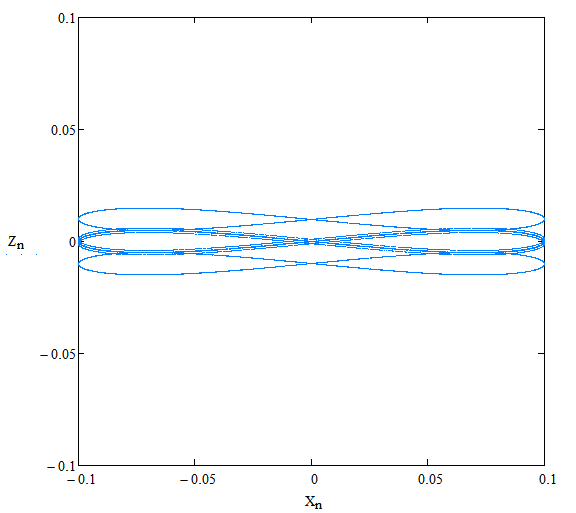
Рис.20. Плоскость XZ
|
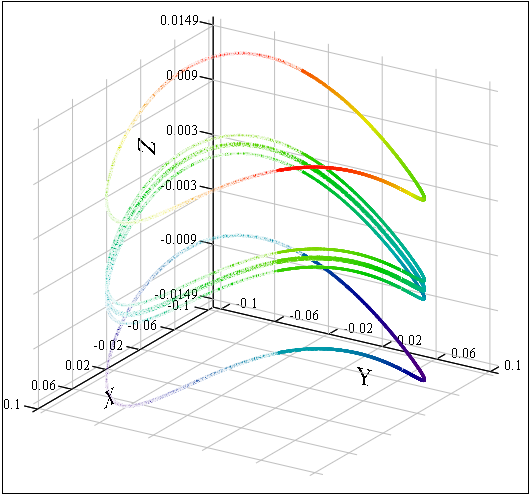
Рис.21. 3-D график XYZ
|
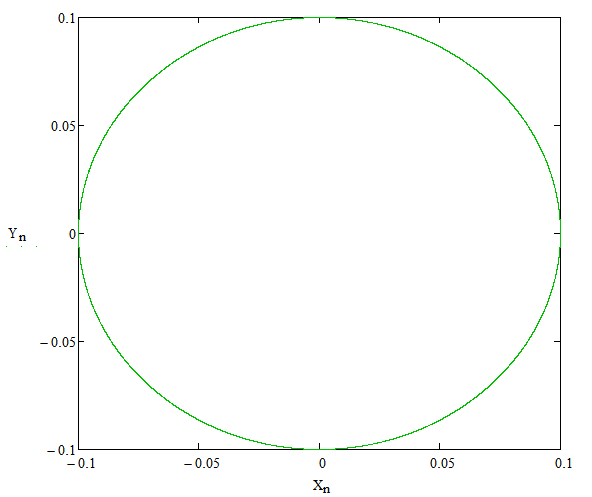
Рис.22. Плоскость XY
|
Графики вероятных направлений относительной скорости \(\beta_r = 0.5\) в различных плоскостях
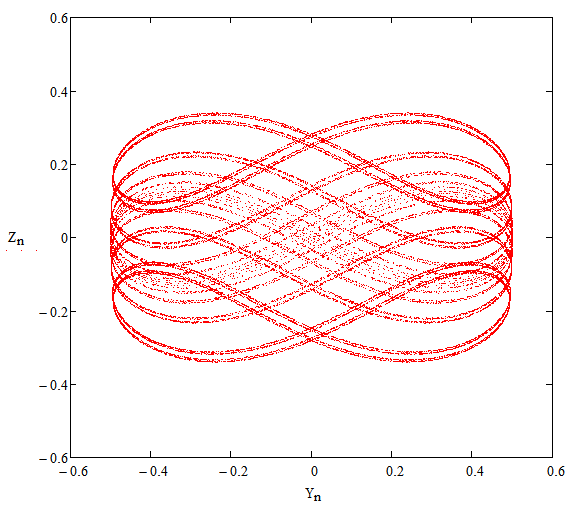
Рис.23. Графикк вероятной скорости по (3.6) при: \(\beta_r = 0.5\). Плоскость YZ
|
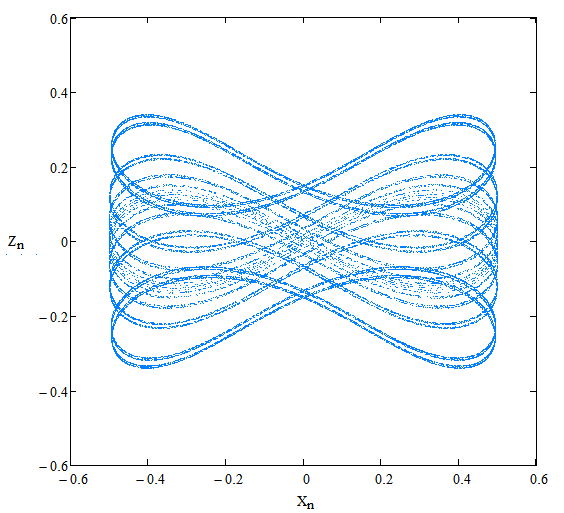
Рис.24. Плоскость XZ
|
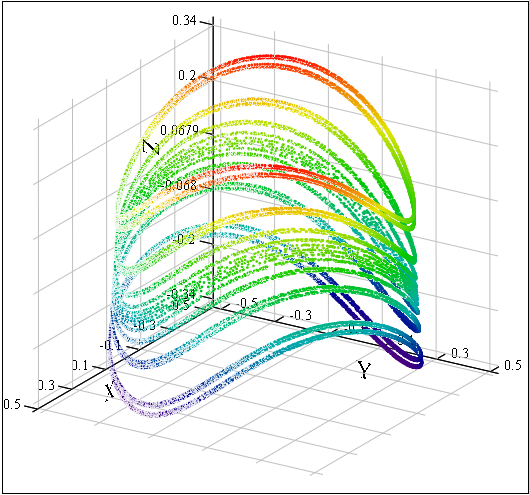
Рис.25. 3-D график XYZ
|
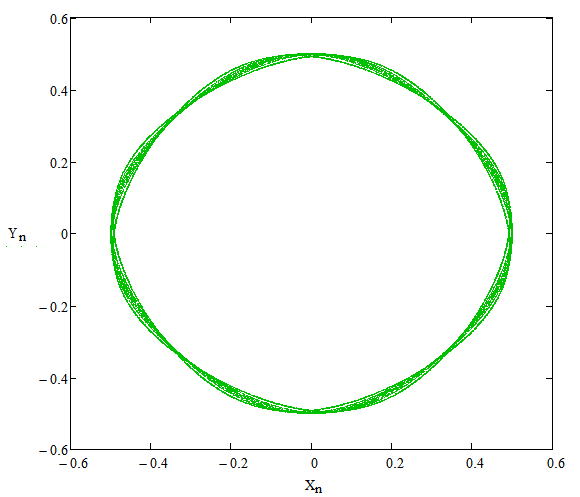
Рис.27. Плоскость XY
|
Графики вероятных направлений относительной скорости \(\beta_r = 0.9\) в различных плоскостях
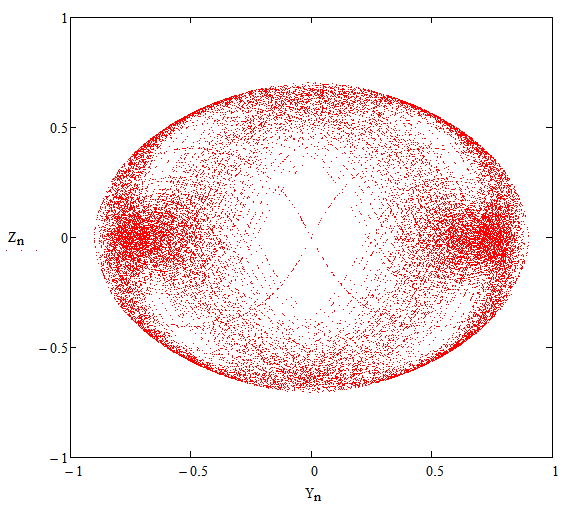
Рис.23. Графикк вероятной скорости по (3.6) при: \(\beta_r = 0.9\). Плоскость YZ
|
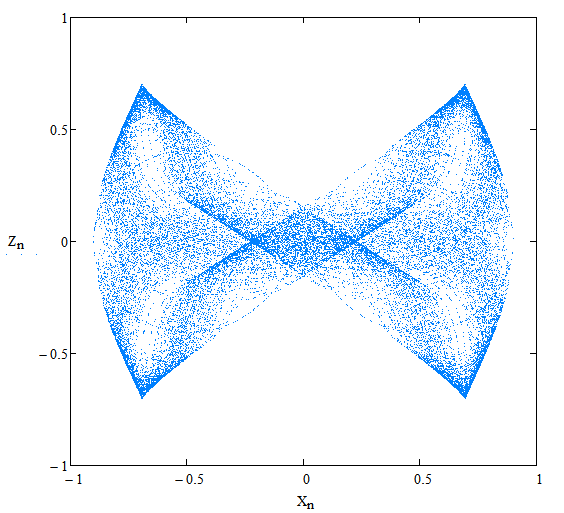
Рис.24. Плоскость XZ
|
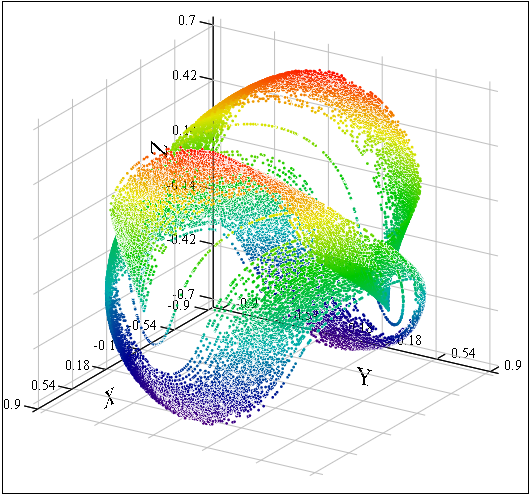
Рис.25. 3-D график XYZ
|
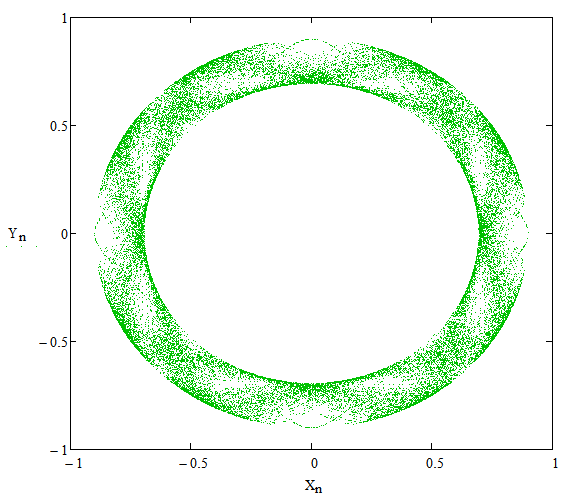
Рис.26. Плоскость XY
|
В последнем случае, в 3-D плоскости, геометрически получаются две скрученные ленты, закрученные друг относительно друга (рис.25).
Подпрограмму для построения этих графиков под MathCAD можно взять здесь.