


2021-08-01
Параметрические генераторы второго рода
Параметрическое генерирование электрической энергии известно уже довольно давно и хорошо освещено в работах [1-5].
Способы генерирования, предложенные там, основаны на параметрическом изменении ёмкости либо индуктивности, которые включены в электрическую цепь без дополнительного источника питания.
Но именно такой источник может превратить такое устройство в полноценный генератор свободной энергии.
Условием для этого является работа генератора в параметрической цепи второго рода.
В этой заметке будет показана принципиальная возможность и некоторые подходы к многократному увеличению
КПД второго рода на конкретных примерах параметрических генераторов второго рода (ПМГ),
причём сделано всё это будет исключительно классическими методами, принятыми в электротехнике и электродинамике для расчёта электрических цепей,
не выходя за рамки классических представлений о физике процессов.
Автор надеется, что эта заметка позволит исследователям по-новому взглянуть на проблему параметрических генераторов и сделать их усилия боле продуктивными.
Эта работа открывает цикл заметок о параметрических цепях второго рода,
отличие которых от цепей первого рода можно найти здесь и здесь.
На этой основе, и по аналогии, мы рассмотрим ПМГ, главная особенность которых — независимость работы задающей и параметрической системы (рис. 1a).
Задающая система (G1) отвечает за генерирование электрической мощности для передачи её в нагрузку Rn через параметрический элемент PME1, а вторая (G2) — за изменение параметра этого элемента.
Подход, приведённый здесь, позволит распостранить этот принцип не только на число электрические, но и на электро-механические машины.
Более детально мы здесь раберём частный случай таких генераторов — цепь, содержащую индуктивность L, которая здесь представляет параметрический элемент,
параметр которой меняется в зависимости от характеристик G2 (рис. 1b).
Источник напряжения G1 вырабатывает колебания, форма которых может быть, в принципе, любой: от синусоидальной, до импульсной.
Это напряжение подаётся на последовательно соединённые индуктивность L и активное сопротивление R, вместе создающие протекающий по этой цепи ток I.
Индуктивность катушки L меняется по известному закону, который генерирует G2.
Именно на эту схему мы и будем опираться в последующем изложении.
Рис.1. Структурная схема ПМГ второго рода (a), принципиальная схема ПМГ второго рода (b)
|
В данной работе мы будем подразумевать идеальный случай, когда G1 никоим образом не влияет на G2, и наоборот.
В реальности — к этому нужно будет стремиться.
Например, частично можно приблизиться к идеальным условиям, если в качестве катушки L применить трансформатор с орготональными обмотками,
где одна из них подключается к G1 и будет проходной, а другая — будет менять магнитную проницаемость сердечника этого трансформатора в зависимости от G2.
Подобный трансформатор предлагается, например, здесь.
Из схемы на рисунке 1b мы сразу же можем записать уравнение электрической цепи, согласно закону Кирхгофа:
\[L(t)\, \dot I + R I = U(t) \qquad (1.1) \]
Здесь: \(I\) — ток в цепи, \(\dot I = dI/dt\) — производная тока по времени, \(R\) — сопротивление нагрузки, \(U(t)\) — напряжение колебаний G1, которое может иметь различную форму.
Индуктивность \(L\) меняется от параметра, задаваемого G2, но синхронизированного по времени с G1.
В этом случае: \(L = L(t)\).
На самом деле, в уравнении (1.1) должно быть ещё одно слагаемое: \( I\, dL/dt\), но поскольку мы будем рассматривать идеализированные импульсы с нулевым по времени фронтом и спадом,
то это слагаемое окажется очень малым и мы его приравняем к нулю.
Важно. В этой работе мы не учитываем энергетику, которая затрачивается на изменение параметра индуктивности.
В реальности всё будет зависеть от способа, или даже физического принципа, меняющего этот параметр.
Суммарный баланс получаемых мощностей в реальном устройстве может оказаться как больше, так и меньше затрачиваемых.
Давайте сразу перейдём к делу и поэкспериментируем над прямоугольными импульсами, а заодно — подберём методику для таких исследований.
Например, пусть генератор G1 вырабатывает прямоугольные импульсы со значениями "1" и "-1" (рис. 2a).
В те же временные интервалы генератор G2 меняет параметр индуктивности от "1" до "0.2", то есть индуктивность меняется в пять раз (рис. 2b).
Таким образом, в поставленной задаче мы должны ответить на два вопроса: как изменяется ток через нагрузку и какой баланс мощностей мы получим в результате.
Рис.2. График импульсов генератора G1 (a), изменение индуктивности L (b и c)
|
Для ответа на поставленные вопросы можно решить дифференциальное уравнение (1.1) в специальном матеметическом редакторе,
но, как оказалось, при некоторых значениях элементов схемы, алгоритмы таких редакторов дают сбой и неправильные результаты.
Решить же аналитически такое уравнение либо затруднительно, либо вообще невозможно.
Поэтому мы пойдём другим путём и возьмём за основу устойчивый пошаговый алгоритм вычислений, представленный здесь.
Формула (1.1) — это уравнение Бернулли, которое, к слову, содержит в себе ключ к поиску свободной энергии.
Не будем загромождать выкладками поиск этой формулы и сразу запишем её пошаговое решение:
\[I_i = { L_i\, I_{i-1} + U_i\, \Delta t \over L_i + R\, \Delta t} \qquad (1.2) \]
Где: \(i\) — номер шага итерации, который начинается с единицы и заканчивается \(N\), определяющим число колебаний, умноженное на число точек для построения одного колебания.
При этом считаем, что начальное значение тока равно нулю: \(I_0=0\).
Шаг итерации возьмём равным 1/4, ведь именно столько точек содержит в себе одно колебание по рисунку 2, тогда: \(\Delta t=0.25\).
Также, для начала примем значение сопротивления нагрузки, равным единице: \(R=1\).
Найти значения тока по формуле (1.2) можно пошагово вручную, но проще, чтобы это сделал компьютер.
Возьмём 16 точек для построения (\(N=16\)) и построим график при помощи MathCAD (рис. 3).
Можно проверить точность построения, если взять стандартное для MathCAD решение дифф. уравнения и 50000 точек.
Тогда график преобразится в рисунок 4.
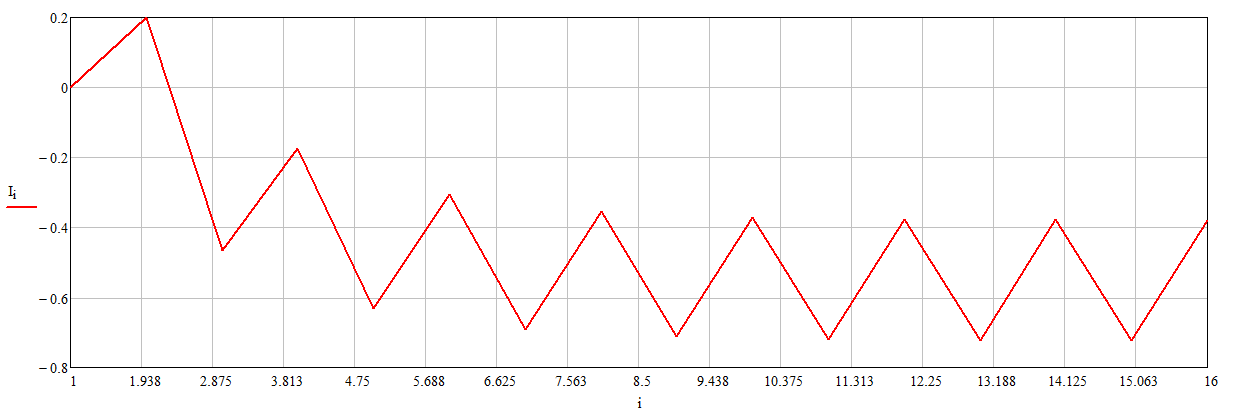
Рис.3. График тока, построенный из 16-ти точек по итерационному алгроритму
|
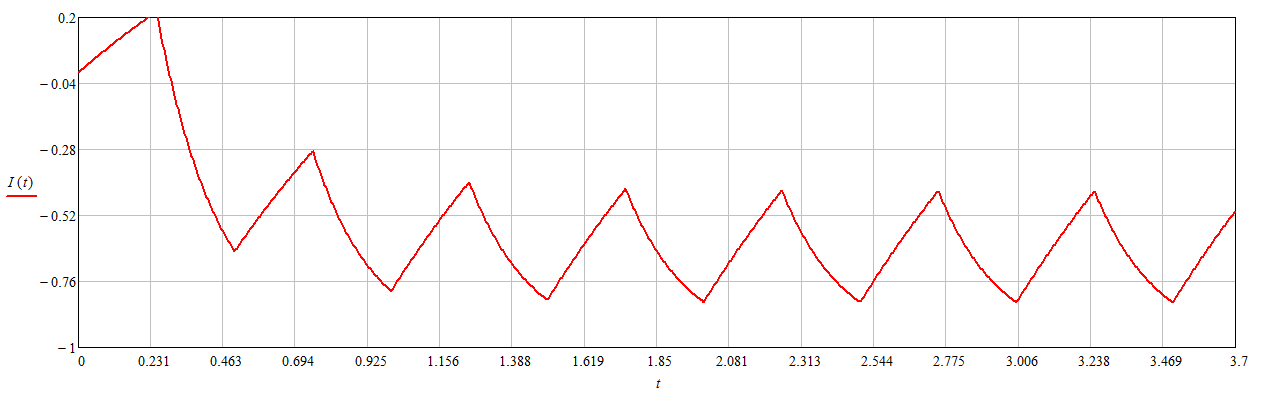
Рис.4. График тока, построенный из 50000 точек по внутреннему алгроритму мат. редактора
|
Хотя график из 16 точек на рисунке 3 не такой точный, как на рисунке 4, состоящий из 50000 точек, но на нём также видно главное отличие ПМГ второго рода от классического:
график сползает в отрицательную область тока, чем и обеспечивается прирост КПД.
Сразу же нужно добавить тот факт, что график тока можно сместить и в положительную область, но для этого нужно повернуть изменение индуктивности относительно напряжения на 180 градусов,
как это сделано на рисунке 2c.
Интересно, что в этих случаях индуктивность L приобретает свойства отрицательного сопротивления [6] и становится дополнительным источником энергии в параметрической цепи.
Но такое смещение работает только в случаях, когда частоты G1 и G2 совпадают, что само по себе уже интересно, т.к. по классике параметрика начинает работать при удвоенной частоте в G2 относительно G1.
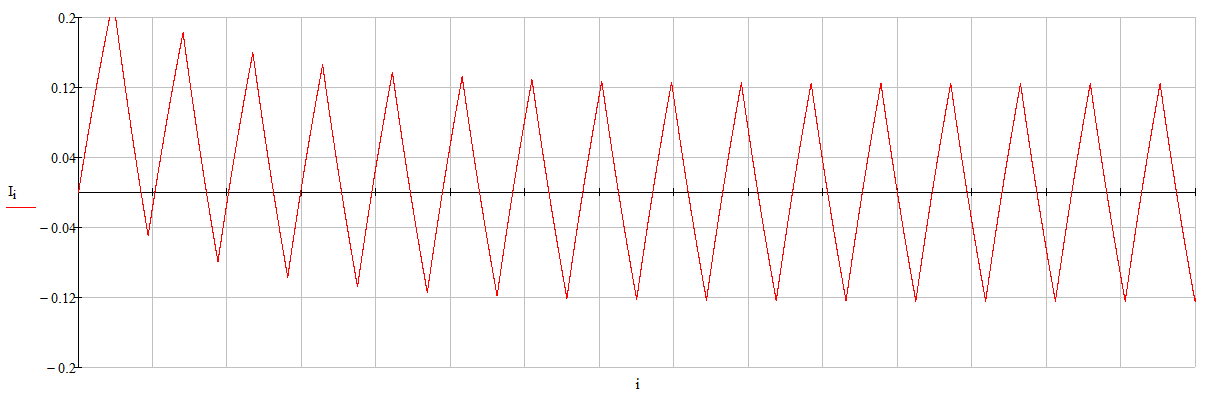
Рис.5. График тока в непараметрической цепи
|
Для сравнения, чуть выше приведён график тока в цепи, где параметрическое изменение индуктивности не происходит и \(L=1\) всегда.
Хорошо видно, что в этом случае после установившегося режима, колебания становятся симметричными относительно нуля (рис. 5), а их интегральная сумма стремится к нулю.
Здесь прироста КПД не наблюдается.
Баланс мощностей
Поскольку у нас теперь есть надёжный инструмент для поиска решений уравнения (1.1) и редактор, то количество точек итерации можно увеличить, что мы и будем делать при последующих вычислениях.
А пока нам нужно ответить на второй наиглавнейший вопрос задачи и найти баланс мощностей для нашего ПМГ.
Для этого сначала получим мощность рассеяния в активной нагрузке R:
\[P_R = {R \over N} \sum_{i=1}^N (I_i)^2 \qquad (1.3) \]
Здесь: \(N\) — число точек для построения графика.
Например, для рисунка 3 число точек равно четырём: \(N=16\).
Чем больше будет таких точек, тем точнее будет результат.
Теперь найдём мощность, затрачиваемую источником питания:
\[P_U = {1 \over N} \sum_{i=1}^N (U_i\, I_i) \qquad (1.4) \]
Необходимо напомнить, что в этой работе мы не рассматриваем мощность генератора G2 (рис 1a), расходуемую на изменение параметра индуктивности,
но в балансе мощностей мы её должны учесть:
\[K_{\eta 2} = {P_R \over P_U + P_{pm}} \qquad (1.5) \]
Здесь: \(K_{\eta 2}\) — прирост КПД второго рода, из которого сразу следует коэффициент эффективности COP;
\(P_{pm}\) — мощность расходуемая на изменение параметра индуктивности, которую мы пока приравниваем к нулю.
На основе этих формул, во второй части, мы разберём примеры параметрических генераторов с различными формами импульсов и соотношением частот,
сделаем некоторые выводы об источниках приращения энергии в подобных системах.
Используемые материалы
- Мандельштамм Л.И., Папалекси Н.Д. О возбуждении колебаний в электрической колебательной системе при помощи периодического изменения ёмкости. [PDF]
- Мандельштамм Л.И., Папалекси Н.Д. О параметрическом возбуждении электрических колебаний. [PDF]
- Лазарев В.А. О гетеропараметрическом возбуждении. [PDF]
- Гуляев В.И., Мигулин В.В. Об устойчивости колебательных систем с периодически изменяющимися параметрами. [PDF]
- Зацаринин С.Б. Параметрическое генерирование электрической энергии. [PDF]
- Карасев М.Д. Некоторые общие свойства нелинейных реактивных элементов. УФН 69 217–267 (1959)